3D laser radar combine long range & high accuracy
J. Busck and H. Heiselberg developed with the 4 Picos ICCD camera a non-scanning 3D laser radar based on gated viewing principle. They showed excellent sub-millimetre accuracy up to ranges of 10 m and 1 cm accuracy at 100 m distance to the object.

3D Laser radar method for long range measurements
The gated-viewing principle implement with the high speed gated ICCD camera, 4 Picos, enables extreme accurate non-scanning 3D Laser radar solutions. This 3D Laser radar can be used for high-accuracy and long range measurements. The combination of a short pulsed Laser source and a short gated camera enables sub-millimetre depth resolution. Furthermore, J. Busck, et al. reporting a field trial where the 3D Laser scanner are located in a van. An image taken of a second vehicle at 93 m distance is shown above.
3D Laser radar improves image quality at bad weather
The above image is taken on good weather conditions an show excellent depth resolution to detect any kind of vehicle. Bad weather conditions as fog and snow generally decrease the viewing range of the 3D Laser radar. However, the gated viewing technique does improve images relative to standard 2D images. 3D gated viewing allows to gate at certain distances thereby removing backscattered light from fog, snow, smoke or dust. This fact could be demonstrated in field trials. It is even possible to see through car windows and record details inside the car. Unfortunately, in the figure above this was prevented by a layer of ice crystals on the front window of the car.
Remote face recognition using high-accuracy 3D Laser radar
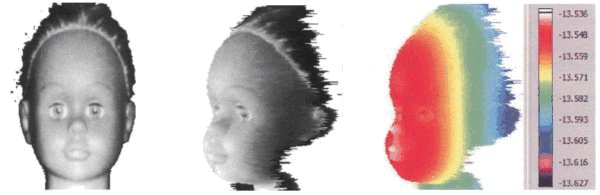
The gated viewing 3D Laser radar method can be applied for high accuracy face recognition. Due to eye-safety the principle was shown on a 25 cm tall doll. The range to the doll was 13.5 meter. The figure above shows the illuminated contrast, the 2D contrast image and the color coded 3D range image. The 3D Laser radar system can produce pictures with sub-millimeter range accuracy as it can be seen on the color scale at the very right. For longer distances, the SNR is lower due to reduced reflected intensity, which go as r^2, and the range accuracy decreases correspondingly. J. Busck, et al. report range accuracy of below 1 mm at 10 m and 1 cm at 100 m distance to the object.
Gated-viewing 3D Laser radar principle
Any light pulse travels with roughly 30 cm/ns in air and is reflected at any point of reflection in the path of propagation. While the laser light propagates along the scene the camera gate is kept closed to avoid reflections and backscatter from unwanted ranges. At the predefined delay time the camera gate opens for the minimum gating time of 200ps. The camera gets triggered for each Laser pulse and light from several laser pulses are accumulated on the CCD sensor. When the image of the camera is transferred to the computer the proceeding is repeated with increasing delay times. In one second 50 delay times (equivalent to range intervals) are scanned by the 4 Picos ICCD camera and the correspondent reflectivity is recorded in 50 images.
![]()
Calculation of the 3D distance profile
With these 50 images the specific intensity profile can be determine for each individual pixel. The intensity profile of several pixel though the whole stack of delay times is shown at the right. The illumination versus range plot results from convolution
of the camera gate time and the length of the Laser pulse. These curves represent the reflection from a common point at the target. There is a minor range correction to be applied to the absolute range due to the internal trigger propagation delay
time of the camera. Though, in order to improve the range accuracy it is important to subtract the right background level from each 2D image source.
Title: High-accuracy 3D laser radar
Author: J. Busck, H. Heiselberg
Institute: Technical University of Denmark, Lyngby, Denmark